Heterogeneous Dynamic Logic: Provability Modulo Program Theories
We introduce Heterogeneous Dynamic Logic (HDL), a framework for combining reasoning principles from distinct (dynamic) program logics in a modular and compositional way. HDL mirrors the architecture of satisfiability modulo theories (SMT)
3. Apr 2026
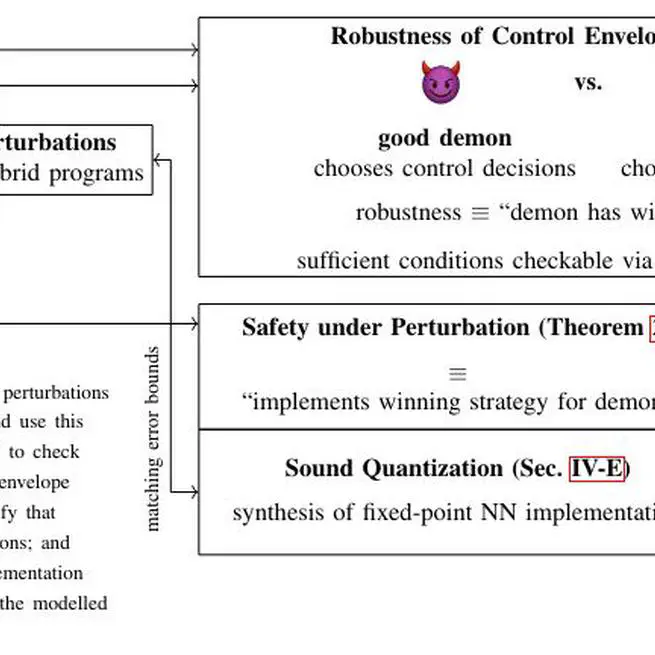
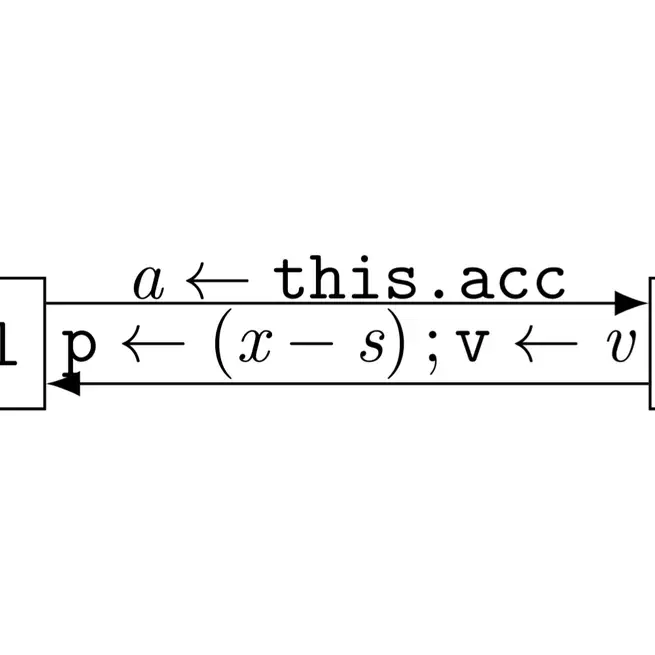
Of Good Demons and Bad Angels: Guaranteeing Safe Control under Finite Precision
We extend the differential dynamic logic-based NN verification technique VerSAILLE (NeurIPS'24) to support verification under perturbations and leverage this result to derive end-to-end safety guarantees that carry over to fixed-point arithmetic implementations of (originally) real-valued NNs.
6. Oct 2025
Verification of Autonomous Neural Car Control with KeYmaera X
We apply differential dynamic (refinement) logic to a case study on neural highway control. After modelling the abstract system we use VerSAILLE and the NCubeV tool [NeurIPS24] to (dis)prove the safety of concrete neural networks. Along the way we uncover numerous interesting results on the highway-env simulation environment including inconsistencies between the provided specification and the actual simulation.
10. Jun 2025
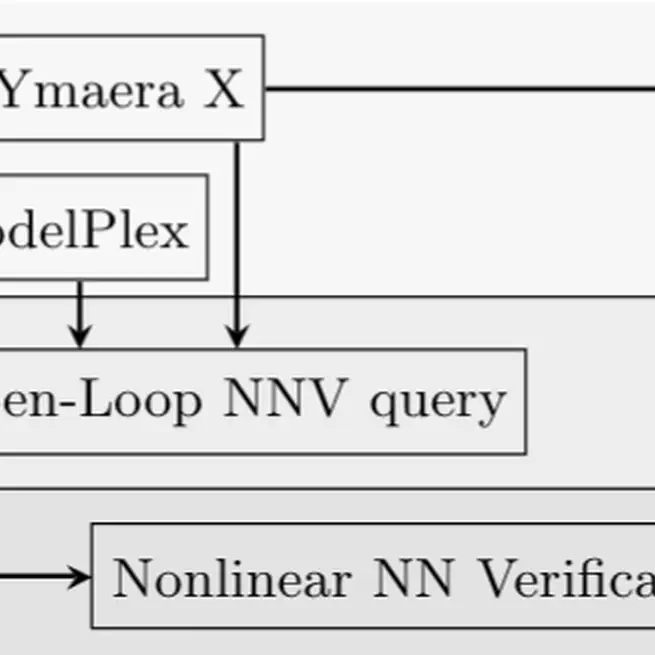
Provably Safe Neural Network Controllers via Differential Dynamic Logic
We present the first approach for the combination of differential dynamic logic (dL) and NN verification. By joining forces, we can exploit the efficiency of NN verification tools while retaining the rigor of dL. This yields infinite-time horizon safety guarantees for neural network control systems.
10. Dec 2024